
文/郭銘哲
.png) 壹、前言
壹、前言
108新課綱以「素養」做為課程發展主軸,提出「以終為始」的課程設計理念,強調教師應以學生的學習成效為標的,做為課程的教學目標,並據以擬定課程進行方式。另一方面,科技領域的STEM或STEAM的教學模式則強調結合科學(S)、科技(T)、工程(E)、藝術(A)、數學(M)等領域進行「探究與實作」的過程,並且透過實際的專題或成品製做,讓學生學習「工程設計思考」,進一步透過工程設計與專題製作的過程中,將STEM或STEAM的內涵融入其中。
在108課綱的課程架構下科技領域除了原有的必修課程之外新增了很多的選修課程,包含加深加廣的「工程設計專題」、「科技應用專題」、「機器人專題」「進階程式設計」等,但是除了這些直接與科技領域相關的加深加廣選修之外,其實尚有「校本課程」是一個發展特色課程的空間。本文即是以校本課程中的「海洋科技專題」為出發點,結合STEM與工程設計思考所發展的實作課程。
貳、海洋開發與ROV
ROV(Remotely Operated underwater Vehicle)遙控操作水下載具,其鼻祖是(Unmanned underwater vehicles,UUV)無人潛航器,1953年法國人第米特里·瑞比克夫(Dimitri Rebikoff)發明了第一台UUV(無人水下載具,民109)。由此可見水下遙控操作的概念已經由來已久。實際上近二十年來由於各項海洋深度開發的需求,使得ROV與AUV的發展也突飛猛進。在傳統的海洋科技領域多集中在水上載具與水下聽音設備的開發,水下設備也以有人載具為主。但是隨著水下工作的深度越來越深,已超出人體所能承受的程度,背負水肺潛水裝置下潛的最大安全作業深度是39公尺,因此使得ROV的需求大增。
ROV主要用途包含有海洋探測、水下開發與水下設備檢測、海底油管、纜線佈放與檢測、海洋休閒娛樂等。ROV工作的深度與是否需要機械手臂或額外的動力裝置進行相關機能的操作,是不同用途的主要區別。現行的ROV普遍具有高亮度的水下燈具與高解析度的水下攝影裝置,透過連結的纜線將即時影像傳送到遠端遙控設備上顯示。
「如何抗壓」是影響水下操作設備設計的主要因素,每增加十公尺的水深所增加的「壓力」約等同一個大氣壓力,下潛至100公尺深度的ROV設計必須能夠抵抗至少10個大氣壓力。完整的ROV系統基本上需要具備:1.岸上操作平台(控制室或遠端遙控裝置)、2.纜線(臍帶)與絞盤、3.ROV下潛載具本體、4.岸上動力供應系統、5.佈放與回收裝置。隨著ROV的需求不同相關系統備也會有所增減。
浮力的產生是另一項要素,下潛深度小於100公尺的ROV浮力是以自身包覆式結構體所產生的排水量為主,但是包覆式結構體的抗壓能力視結構體強度而定。隨著水深增加,為了抗壓必須增加結構強度,材料的厚度,耐壓等級也需提升,成本也為之增加。潛航深度較深的ROV則採用開放式結構與固體浮力材料。常見的材料有化學泡沫複合材料、輕質合成複合材料、微珠(常用玻璃浮球、陶磁浮球與複合泡沫材料等三大類)的方式來製作(海洋新材料之深海浮力材料,民107)。固體式浮力材料產生的浮力,用以抵銷結構與設備重量,以期達到中性浮力。重要且不可接觸水的裝置,安裝在密閉的設備艙中並且灌滿「油」,利用油的可壓縮性較低,且再利用活塞與連通管原理,讓海水推動外部活塞調整密閉管內壓力與外界海水水壓,達到內外壓力平衡維持結構安全。

參、簡易ROV設計製作的教學
一、課程安排
本次海洋科技專題課程為每週一學分的教學時數,上課16週,實作(包含設計、製作、測試、修正、檢討等)過程大約需要至少三分之二課程時數,課程講述教學時間約4-6小時。
二、材料準備
三、學習歷程檔案與教學實況
因應108新課綱對學習歷程檔案的要求,以學習歷程檔案範例取代單純學習單。
評量:
建議可分為三大方向。
1.分階段製作進度評量(包含個人與小組的形成性評量)。
2.製作精細程度與是否完成功能(包含測試與競賽結果)。
3.學習單(學習歷程檔案)撰寫是否完整,主要授課內容與核心知識是否能夠呈現、是否發現問題並加以修正反省。
學習歷程(學習單)掃描
教學實況
肆、ROV中的STEM內涵
一、S:科學內涵
1.浮力計算
簡易ROV的浮力來自結構浮力與浮材。在設計階段,學生必須先測量與計算所使用的管狀結構材料(3/8吋PVC管)所可能產生的排水量。
以製作一個L型結構為例,使用1.長度15公分管徑三分(外徑19mm、內徑14.4mm)、2.三分管用90度彎管(外徑23.8mm、內徑18.2mm、銜接內孔長度28.5mm)。製作L行結構。
2.結構排水量(結構未鑽孔的情況下):
15公分直管套入90度彎管後,露出長度為150mm-28.5mm=121.5mm。
90度彎管長度為長邊50.2,短邊25.8。
計算可得如前後開口為封閉狀態則所產生的排水量(體積):
121.5X(9.5^2X3.14)+50.2X(11.9^2X3.14)+25.8X(11.9^2X3.14)=68235mm^3大約68立方公分=68g,依此計算方式可以求得所有管狀結構所產生的排水量以及動力艙的體積即可換算出結構排水量。
3.結構排水量(結構未鑽孔的情況下):
V=IR,使用市售Cat5e網路線對ROV馬達供電,電阻隨著網路線長度增加會使得ROV驅動馬達可以使用的電流減小,因此必須計算使用不同長度的網路線供電時,由線控器至ROV驅動馬達電流下降的情況,以及電壓與電流否在馬達最有效的輸出曲線中。
假設有兩條不同長度的網路線,其電阻值分別為2歐姆與2.5.歐姆,使用電壓為7.4V的鋰電池,計算其電流量如下:7.4=I x 2 得到I=3.7 7.4=I x 2.5 得到I=2.96
經由電流計算結果可以估算臍帶(連接纜線)最大可使用的長度為何?如果臍帶(連接纜線)過長,會因為電流太低導致馬達無法運轉。
二、T:科技內涵
1.機電控制
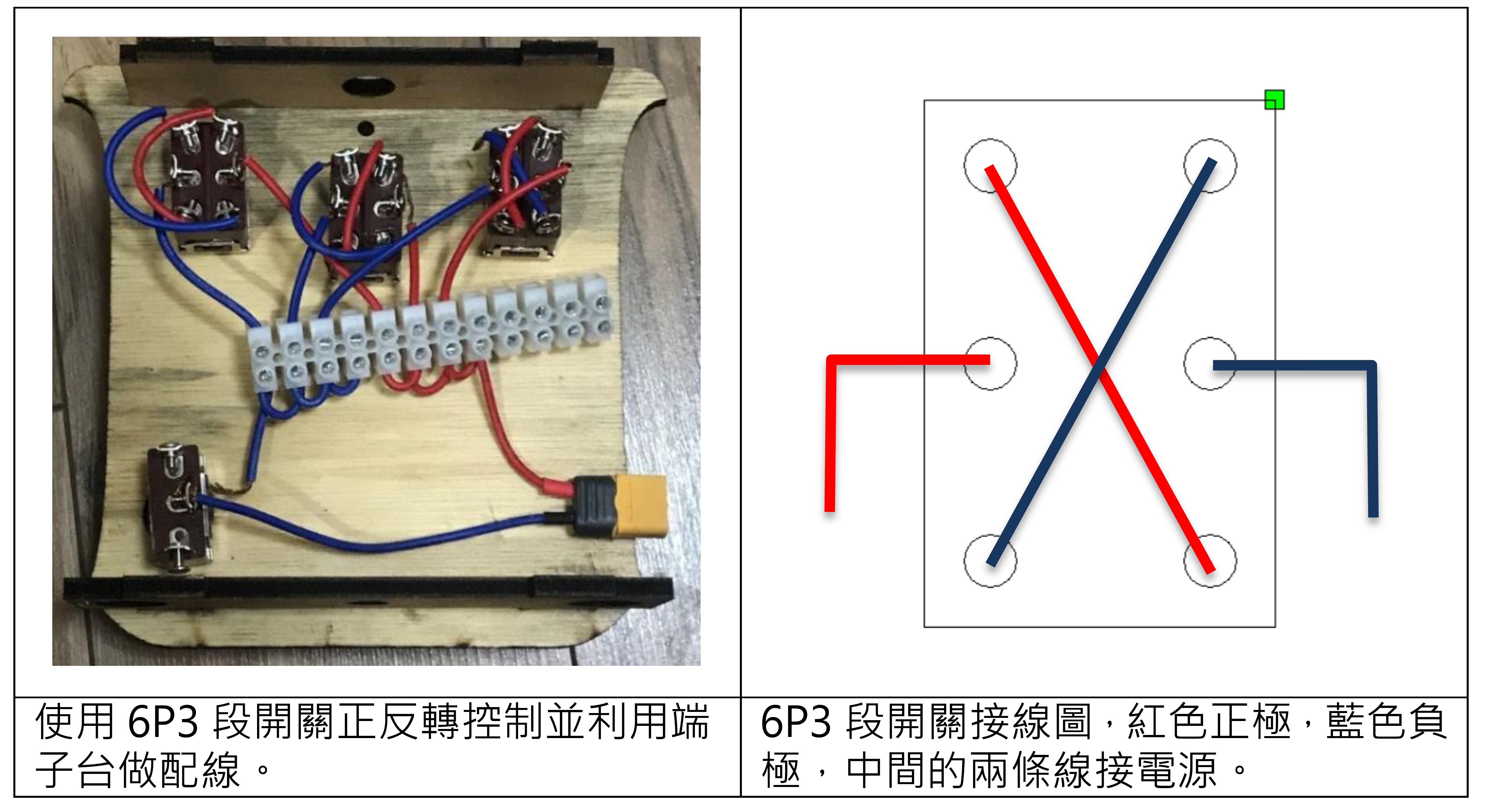
使用6P3段開關作正反轉控制,簡易ROV使用三個動力艙作三軸向運動的控制,因此也需要三個6P3段開關作馬達正反轉控制。下圖為6P3段開關作這反轉控制的接線方式。
電源開關控制使用3P兩段,並搭配開關安全蓋,緊急時安全蓋蓋上立即斷電。
2.ROV結構設計與繪圖
線控器因為要使用雷射切割因此需用電腦軟體繪圖,管狀結構部分利用手工剪切組裝即可,有尺寸標示的手繪三視圖及立體圖表示即可。
三、E工程內涵
1.PVC水管組裝
管狀結構組裝不需使用水管接著劑,直到經過測試完成確定已達最佳化不再更動才需要使用,實務上在製作完成後一定有需要修正的部分也就是工程設計中測試與修正,如果使用了接著劑將PVC管都黏住之後要進行修正就會很困難。這也是工程上模擬與測試的一環,讓學生了解在實際工程上需要面對的問題。
2.中性浮力:ROV必須達到中性浮力,才能夠穩定的上升和下沉。
3.正 浮:ROV必須達到正浮(以結構中心為準,水平面上的四個角落與水面的距離必須相等。
4.水密措施:密封馬達的膠捲桶必須確實防水密閉。
5.方向控制:螺旋槳的旋轉方向必須正確,且與機體的夾角必須正確。以免推進時偏離預定行進路線。
四、M數學內涵
在簡易ROV的製作過程中,數學計算部分多為較簡單的一般計算,但是如果是較為進階複雜的ROV控制,例如:具有感測與回授控制電路與程式時,就需要較為複雜的計算能力。
伍、結語
108新課綱所帶來的課程鬆綁與改變,讓科技領域相關的課程有了很大的空間進行推展。特別是除了原有的加深加廣課程之外,各校有許多開設校本課程或微課程的空間與時數,可以提供學生更多面向的探索與學習。科技發展越來越快速,因此科技教育的推展是讓台灣的下一代能夠持續保有競爭力的重要措施,而STEM或STEAM的教學模式可以讓學生真正將所學應用與融合,並且培養出實際動手解決問題的習慣與態度。加上工程設計觀念的導入,相信更可以強化學生有系統地解決問題的能力,培養出學生的科技「素養」。
這樣的「素養」能力當然不是一朝一夕立刻可以培養完成,但是相信透過不同年段(國中、高中),不同的課程教學,相同的核心概念推動,經過一段時間的學習,我們可以讓學生建立起「科技素養」與「解決問題的能力」。